 Les véhicules autonomes sont passés de science-fiction à réalité industrielle grâce aux progrès scientifiques dans les domaines automobiles, robotiques et aux innovations technologiques, notamment les ordinateurs embarqués. Autonomiser des véhicules permettrait de fluidifier le transport des biens et des personnes en incluant des facteurs environnements, économiques et sociétaux. La conception d’un véhicule autonome est hiérarchisée par trois étapes : la perception, la planification et la commande. La perception étant la première étape, elle est hiérarchiquement cruciale et une erreur peut engendrer un mauvais contrôle du véhicule et des accidents. Thomas Joss-Laurain, enseignant à l’ENSISA et chercheur à l’IRIMAS, décrit EviDeep, son nouveau projet.
Les véhicules autonomes sont passés de science-fiction à réalité industrielle grâce aux progrès scientifiques dans les domaines automobiles, robotiques et aux innovations technologiques, notamment les ordinateurs embarqués. Autonomiser des véhicules permettrait de fluidifier le transport des biens et des personnes en incluant des facteurs environnements, économiques et sociétaux. La conception d’un véhicule autonome est hiérarchisée par trois étapes : la perception, la planification et la commande. La perception étant la première étape, elle est hiérarchiquement cruciale et une erreur peut engendrer un mauvais contrôle du véhicule et des accidents. Thomas Joss-Laurain, enseignant à l’ENSISA et chercheur à l’IRIMAS, décrit EviDeep, son nouveau projet.
« Percevoir l’environnement, c’est détecter et classifier les obstacles rencontrés par le véhicule à l’aide des différents capteurs embarqués. Une approche de plus en plus émergente est l’intelligence artificielle qui, à partir des images issues de la caméra, peut classer les objets. Au moyen d’un entraînement et d’une grande quantité de données, les réseaux de neurones sont capables d’extrapoler devant des situations inconnues ; ces réseaux de Deep Learning sont donc des détecteurs extrêmement robustes.
Une autre approche consiste à agréger ensemble les données issues de tous les capteurs, et de prendre en compte les différences de ces données : nuages de points lasers, images, signal GPS, radar, etc. L’approche par la théorie évidentielle permet d’introduire la notion mathématique d’ignorance et de conflit, ainsi que des outils de prise de décision automatique permettant d’opter pour la meilleure hypothèse. Cette approche évidentielle est très précise car reposant sur des modèles mathématiques de chaque capteur. »
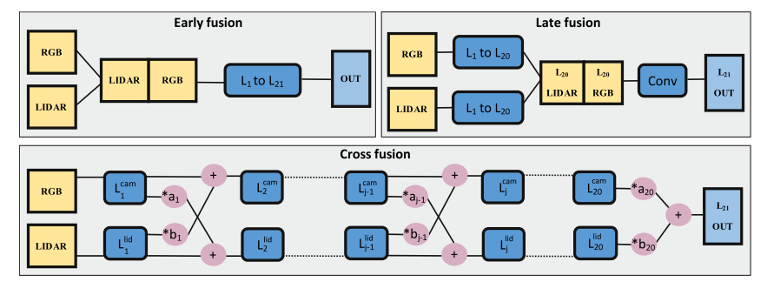
Intégration de la fusion de données avant le réseau, après le réseau et dans le réseau [Caltagirone et al., 2019]
« Le projet EviDeep vise à proposer une méthode combinant les deux techniques, par la conception d’un réseau de neurones intégrant des fonctions évidentielles. L’hypothèse est faite que la combinaison des méthodes devrait combiner les avantages des deux approches, donc concevoir un système de perception qui soit à la fois robuste et précis. Le risque de cette idée innovante est de cumuler les avantages mais également les inconvénients. En effet, ces deux techniques sont réputées pour être très gourmandes en temps de calcul ; un système combinant ces deux approches pourrait donc nécessiter des composants électroniques de calcul bien supérieur aux cartes graphiques présentes actuellement sur le marché. L’intégration de ce paramètre, et la recherche d’un système optimal et allégé, est à prendre en compte dans le choix des architectures d’intelligence artificielle et d’opérateurs de fusion. »
Partenaires du projet :


Financement :
![]() Agence National de la Recherche, instrument Jeunes Chercheurs Jeunes Chercheuses (JCJC)
Agence National de la Recherche, instrument Jeunes Chercheurs Jeunes Chercheuses (JCJC)
Thomas Josso-Laurain + d’infos IRIMAS